Diseño De Sistemas Embebidos (Arduino One).
Andres Felipe Barona Rodriguez.
Ingeniería Electrónica.
Universidad Santiago de Cali.
Descripción:
Bienvenidos al proyecto final de la materia diseño de sistemas embebidos con Arduino.
Bienvenidos al proyecto final de la materia diseño de sistemas embebidos con Arduino.
¿Que vamos a hacer?
Desarrollo de un robot velocista que pueda competir en eventos de robotica en cuanto a seguidores de linea; donde seguirá una línea marcada en el suelo en el menor tiempo posible
Componentes:
- Arduino.
- Placa de sensores.
- Ruedas.
- Rueda loca.
- Soporte motores.
- Batería.
- Motor.
- PCB
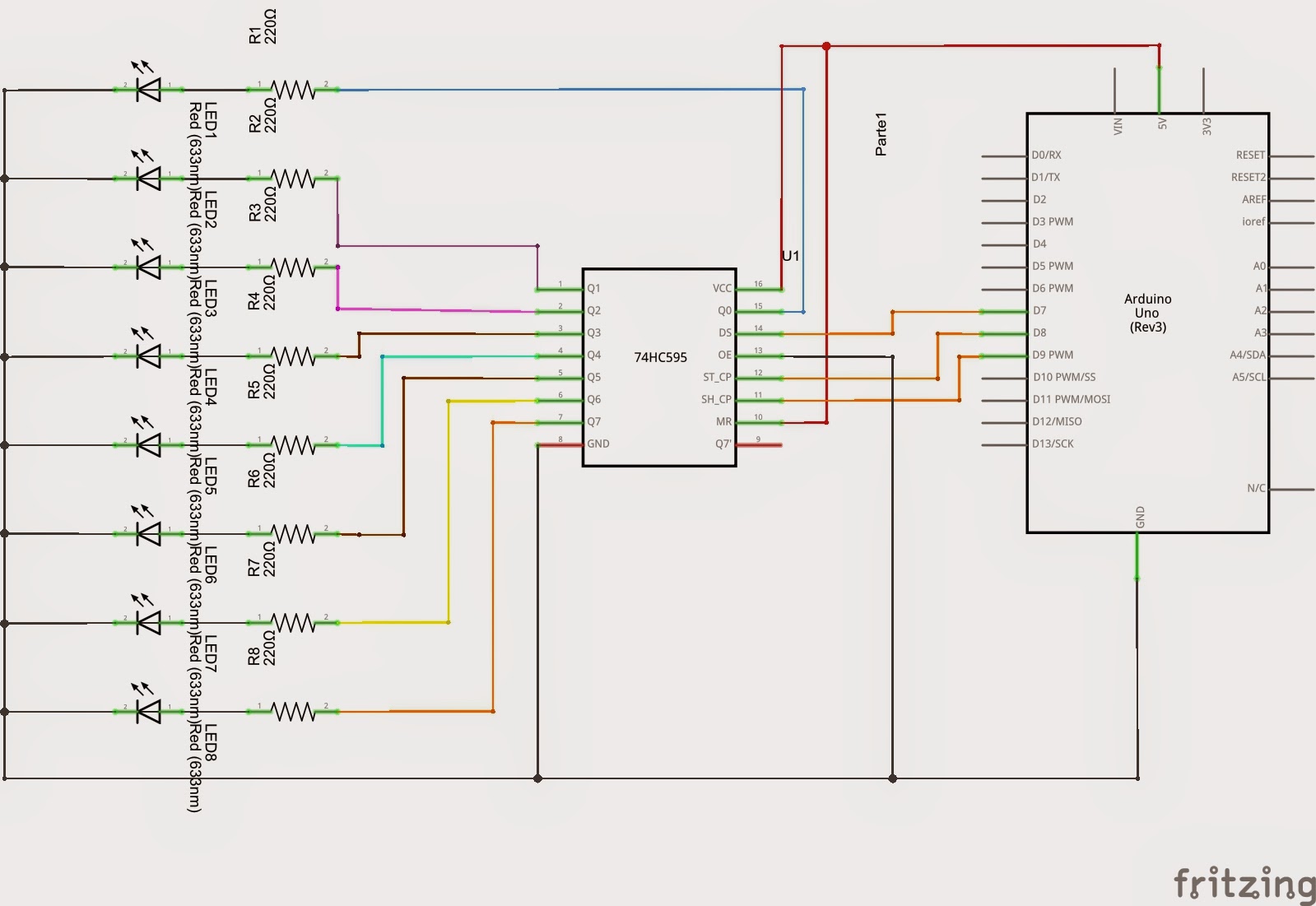
Diagramas:
El circuito del robot velocista se imprimio en pcb.


Esquema:

Código en Arduino:
¿Que vamos a hacer?
Desarrollo de un robot velocista que pueda competir en eventos de robotica en cuanto a seguidores de linea; donde seguirá una línea marcada en el suelo en el menor tiempo posible
Componentes:
- Arduino.
- Placa de sensores.
- Ruedas.
- Rueda loca.
- Soporte motores.
- Batería.
- Motor.
- PCB
Diagramas:
El circuito del robot velocista se imprimio en pcb.



Código en Arduino:
Vídeo:
Imagen con el robot velocista:

Pasos del montaje:
- Construir una base sobre la que poner el pcb (recomendación hacer una plantilla marcando los agujeros de los motores) yo use la siguiente plantilla

- La otra parte que necesitamos para unir los componentes es realizar un pcb (mostrado anteriormente en los esquemas)
- Montamos el pcb y lo ponemos en la base del robot, para conectar los motores se pueden poner un par de conectores o soldar los cables directamente
- Pegar la batería con cinta de doble cara al pcb y hacer un agujero para pasar el cable
- Colocamos la rueda loca, podemos usar unos tornillos para fijarla
- Colocamos la placa de sensores haciendo los correspondientes agujeros para pasar los tornillos, y hacemos el cables para unir los sensores con la placa de electrónica
- Ejecutar el programa en arduino expuesto anteriormente